


Implementation Plan for Drone Operator Training Simulation
As organizations increasingly rely on drones for mission-critical tasks across defense, energy, logistics, and agriculture sectors, the need for effective and immersive drone operator training has become paramount. A well-implemented simulation training system not only enhances operator readiness but also improves safety, reduces operational costs, and ensures mission success.
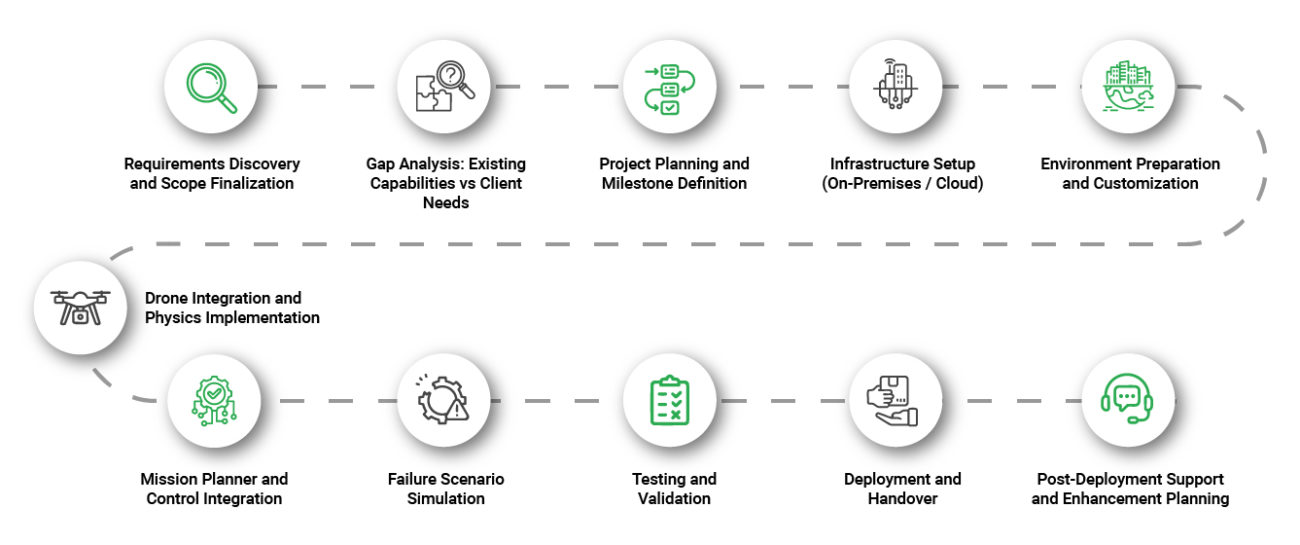
This article outlines a comprehensive step-by-step approach to successfully deploy a Drone Operator Training Simulation using GRID platform and AirGen environment integration tool. It incorporates best practices, identifies potential customization needs, and assures project success across on-premises or cloud deployments.
Phase 1: Requirements Discovery and Scope Finalization
The success of any simulation training project hinges on a clear understanding of the client’s operational requirements and constraints. Initial discovery should focus on:
- Runtime Environment: Whether the simulation will run in a completely offline (air-gapped) environment or a cloud-based/on-prem hybrid setup.
- Operating System and Software Stack:
- Primary OS: Microsoft Windows.
- Subsystem: Windows Subsystem for Linux (WSL) for specific drone software (e.g., ArduPilot).
- Simulation engines and drone control tools.
- Drone Details: Specifications, CAD/mesh files, sensor suite, and physics parameters.
- Training Objectives: Types of missions, failure scenarios, environmental settings, and user interface needs.
- Controllers and Interfaces: Client’s preference for control devices (e.g., Xbox-style game controllers).
The deliverable from this phase is a well-documented scope of work that guides all subsequent stages.
Phase 2: Gap Analysis: Existing Capabilities vs Client Needs
Once the scope is finalized, we conduct a detailed gap analysis to evaluate how the client’s needs align with existing capabilities in GRID and AirGen.
Key Areas for Analysis:
- Drone Physics and Modeling: Assess if existing physics parameters support the drone specifications; identify what needs to be developed.
- Sensor Simulation: Validate the availability of the needed sensors (e.g. IR camera, GPS, IMU simulations, etc.); determine if enhancements are needed.
- Environment Customization: Determine the need for importing offline maps or developing new simulation environments.
- Failure Scenarios: Verify support for GPS signal loss, controller disconnection, and emergency conditions.
- User Interface: Assess if the UI supports weather condition changes, mission monitoring, and manual failure triggers.
A Gap Analysis Report is prepared to outline:
- Supported features (as-is),
- Required customizations,
- Dependencies and technical risks,
- Estimated development effort and timelines.
Phase 3: Project Planning and Milestone Definition
With the gap analysis completed, the project team establishes a clear project plan with defined phases, deliverables, and timelines:
- Simulation Setup Design
- Drone Modeling & Physics Implementation
- Sensor Integration
- Environment and Weather System Configuration
- Mission Planner Integration
- Failure Scenario Implementation
- System Testing and Validation
- Deployment and Handover
Each phase includes milestones, task ownership, and review checkpoints to ensure progress alignment and quality assurance.
Phase 4: Infrastructure Setup (On-Premises / Cloud)
Depending on the client’s runtime environment, the system infrastructure must be configured accordingly:
- Hardware Setup: Servers with required CPU, GPU, and memory resources; ensure compatibility with simulation and AI tools.
- Software Installation:
- E.g. Windows OS with WSL for running drone software.
- Simulation tools (GRID, AirGen).
- Drone mission planner (e.g., Q Ground Controller).
- Network Configuration: For offline environments, ensure all dependencies are locally available and licensed.
- Validation at this step ensures a stable platform for simulation development and testing.
Phase 5: Environment Preparation and Customization
This phase involves building realistic simulation environments tailored to the client’s operational areas.
- Import offline maps or GIS data representing the training zone.
- Configure dynamic elements like vehicles, buildings, and terrain details using AirGen.
- Enable weather condition controls through a simulation UI, allowing users to modify weather (e.g., rain, fog, night) without impacting drone flight dynamics.
Phase 6: Drone Integration and Physics Implementation
Integrate the client’s drone model into the simulation:
- Import 3D CAD/mesh files into the simulation environment.
- Implement drone-specific physics parameters (e.g., weight, propulsion, inertia, thrust).
- Integrate sensor emulation for IR cameras, GPS modules, and IMUs, providing realistic data feedback during simulation.
- Configure controller support (e.g., Xbox-style devices) to allow seamless operator interaction.
This ensures high-fidelity simulation of drone behavior, making training more effective and realistic.
Phase 7: Mission Planner and Control Integration
The drone simulation must be integrated with the client’s preferred mission planning tool, allowing real-time control and mission execution.
- Validate communication between the simulated drone and the mission planner.
- Test mission uploads, telemetry feedback, and live status reporting.
- Ensure ease of use and alignment with live operations.
Phase 8: Failure Scenario Simulation
Simulation of failure conditions is critical for effective safety training, risk mitigation, and operator readiness in real-world mission environments. Our platform enables the creation and control of a wide range of failure scenarios, allowing operators to practice emergency protocols, quick decision-making, and recovery techniques under realistic conditions—all without any real-world risk.
- GPS Signal Loss Simulation: Introduce GPS signal disruption to test anti-jamming readiness and operator ability to switch to alternate navigation modes. This feature can be triggered via a simple command interface for precise control during training sessions.
- Controller Disconnection (RC Failure): Simulate remote controller failure or signal loss by manually disconnecting the controller mid-flight. Operators are trained to initiate fail-safe behaviors such as return-to-home (RTH), hover, or controlled landing.
- Sensor Malfunction Simulation: Emulate sensor degradation or failure for devices such as IMU, IR camera, or GPS. This allows operators to recognize faulty data and switch to manual control or alternative mission plans.
- Battery Failure or Low Battery Condition: Simulate rapid battery depletion or failure scenarios mid-mission, prompting operators to prioritize emergency landing protocols or mission abort procedures.
- Weather Escalation Impact: Enable sudden changes in weather conditions (e.g., fog, rain, wind gusts) that challenge operator visibility and control, even though drone physics remain unaffected. This builds situational awareness and stress management skills.
- Motor or Propeller Failure: Simulate partial propulsion failure (e.g., one motor stops working) to assess operator skill in stabilizing the drone and conducting a controlled emergency landing.
- Communication Link Interruption: Temporarily disrupt data/telemetry transmission between the drone and ground control to simulate loss of situational awareness and test operator response to data blackouts.
Each simulated failure event is logged and analyzed, providing insights into operator response time, decision accuracy, and adherence to safety protocols – preparing operators for real-world anomalies and enhancing decision-making under pressure.
Furthermore, all failure scenarios can be triggered and controlled via an intuitive UI, allowing instructors or operators to quickly select, modify, or combine scenarios during simulation sessions. WalkingTree will be absolutely keen to help build these UIs.
Phase 9: Testing and Validation
Before final deployment, a thorough testing phase ensures the system’s robustness and alignment with client expectations:
- Functional Testing: Validate each feature for correctness.
- Performance Testing: Assess system behavior under load.
- User Acceptance Testing (UAT): Allow client operators to test and provide feedback.
- Document test cases, bug reports, and resolutions.
Phase 10: Deployment and Handover
Following successful testing:
- Deploy the solution to the target environment (on-premises or cloud).
- Deliver all installation guides, user manuals, and administrative documentation.
- Conduct training workshops for client teams.
Phase 11: Post-Deployment Support and Enhancement Planning
We offer ongoing support to ensure the solution performs reliably in live environments:
- Provide hyper-care support during the initial launch period.
- Plan for feature enhancements based on operator feedback.
- Offer maintenance plans for updates, performance tuning, and system scaling.
We offer ongoing support to ensure the solution performs reliably in live environments:
- Provide hyper-care support during the initial launch period.
- Plan for feature enhancements based on operator feedback.
- Offer maintenance plans for updates, performance tuning, and system scaling.
Conclusion
Delivering a high-impact Drone Operator Training Simulation requires careful planning, robust technology integration, and a deep understanding of client needs. By leveraging GRID and AirGen, and following the structured approach outlined here, we ensure successful deployments that meet the highest standards of training quality, safety, and operational readiness.
Elevate Your Drone Training with Realistic Simulations
Optimize your drone operator training with cutting-edge simulations powered by GRID and AirGen. From real-world mission scenarios to failure condition training, our comprehensive implementation plan ensures safety, efficiency, and operational excellence.